ORBITアナログプロポーショナルシステム
送信機
基本的にはリード式の変調周波数による切り換えとGGパルスプロポの考え方を組み合わせたその当時の技術の組み合わせで作られています。右上の低周波発振回路はエルロン用で3500Hz付近で発振します。発振周波数はポテンショメータで数百Hz変化します。右下はエレベータ用低周波発振回路で1750Hz付近で発振してこちらもポテンショメータで数百Hz変化します。この低周波発振回路の出力で電波を変調して受信機側で3500Hzと1750Hz中心のディスクリミネータを通すと、ポテンショメータ位置に比例した電圧が得られます。この方法で低周波発振回路を設けた数だけチャンネル数を増やせそうですが、あまり変調周波数を上げると電波の占有帯域が増加しますし、近い周波数で変調するとディスクリミネータで分離できなくなります。従って、変調周波数の制御ではこの回路のように2チャンネル分ぐらいしか取れません。
そこで飛行機に必要な残り2チャンネル分を確保するためGGパルスプロポの考え方が使われています。2波の低周波発振回路の出力で電波に変調を掛けるわけですが、この2波を時間で切り替えています。左下のブロッキングオシレータがその切り換え用発振回路です。この発振回路は発振周波数と出力Duty比率がポテンショメータで変えられるようになっています。ラダーに出力Duty比率制御(GGのマーク、スペース比)を、モーターコントロールに周波数制御を当てています。つまりラダーの制御量は2波の変調期間の比率で、モーターは2波の変調切り換え周波数として送られます。
受信機
受信機は送信機より複雑になります。高周波回路部分は特に特徴はありません。検波された信号はリミッターで振幅制限されてディスクリミネータに入ります。各ディスクリミネータは2周波数の同調回路とPNP,NPNトランジスタからなり、変調周波数に比例した電圧を出力します。これにより送信機のエルロン及びエレベータ用ポテンショメータ位置に比例した電圧が得られます。
ラダー用にはディスクリミネータで選別される信号でPNP,NPNトランジスタをスイッチングして変調信号の切り換え比率に比例した電圧を得ます。厄介なのがモーターコントロールで、ラダー回路から切り換え信号を得て、その立ち上がりでモノマルチをトリガし、出力を積分することで制御電圧を得ます。
変調周波数の切り換えにより2チャンネル分の制御をしていますので、切り換え周波数をあまり下げるとエルロンとエレベータの応答を遅くしなければなりません。切り換え周波数を上げると変調周波数も上げる必要があります。この辺のバランスが難しい所です。またディスクリミネータは低周波の周波数分別を行いますので低周波トランスのような大きなインダクタンスが必要です。オービットの受信機ではつぼ型コアが使われています。
サーボ
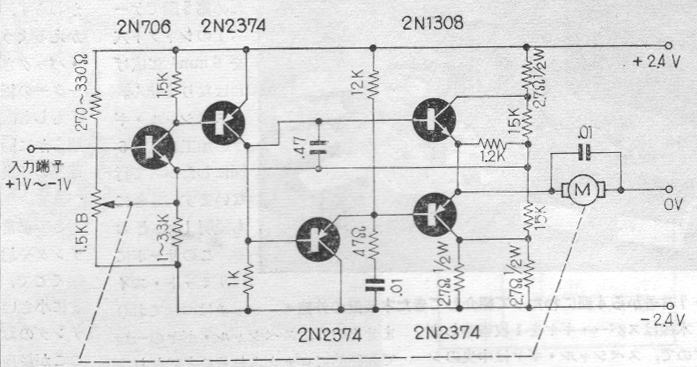
入力電圧に対してサーボホーンに直結したポテンショメータにより直流電圧フィードバックを行います。温度に対する初段トランジスタのベース、エミッタ間電圧変化はニュートラルのずれをもたらすと思われますが、何らかの温度補償が行われているとは思えません。
いずれにしてもこれらの回路ではサーボのニュートラルの安定性を保つのは至難の技ですし、サーボの舵角も不安定と思われます。回路は非常に面白いですが、無理やり比例制御システムを作ったという感じで美しくありません。チャンネル数をこれ以上増やすのは困難ですし、デジタルシステムが出てくれば淘汰されるのは明らかです。
![]()